
CORS-TR e dahil olan Kayseri’deki istasyonlar
kayserideki cors-tr noktalarına ait bilgiler aşagıda tablolar yer almaktadır. ulusal gnss konusunda bilgi almak için ise http://www.tusaga-aktif.gov.tr/ adresinden yararlanılabilir..
| ADI | SAHİBİ | KONUM | IP NO | PORT NO |
|---|---|---|---|---|
| Kayseri Sabit 1 | Kayseri Büyükşehir Belediyesi | Büyükşehir Belediye Binası Üzeri | 212.175.131.8 | 2138 |
| Kayseri Sabit 2 | KCETAŞ | PınarbaşıKCETAŞ Binası Üzeri | 95.9.233.243 | 2138 |
| Kayseri Sabit 3 | Kayseri Büyükşehir Belediyesi | Yahyalıİtfaiye Binası Üzeri | 5.11.170.239 | 2138 |
Kayseri Sabit 1 Ethernet Streaming :
| Mode | Protokol | IP Adres | IP Port | Mesaj Tipi | |
|---|---|---|---|---|---|
| Port I1 | Server | TCP | 2138 | RTCM3.x | |
| Port I2 | Server | TCP | 2139 | RTCM2.3 | |
| Port I3 | Server | TCP | 2137 | CMR+ | |
| Port I4 | Client | TCP | 78.186.124.38 | 2136 | RTCM3.x |
| Port I5 | Server | TCP | 2135 | ATOM |
Kayseri Sabit 2 Ethernet Streaming :
| Mode | Protokol | IP Adres | IP Port | Mesaj Tipi | |
|---|---|---|---|---|---|
| Port I1 | Server | TCP | 2136 | ATOM | |
| Port I2 | Server | TCP | 2137 | CMR+ | |
| Port I3 | Server | TCP | 2138 | RTCM3.x | |
| Port I4 | Server | TCP | 2139 | RTCM2.3 |
Kayseri Sabit 3 Ethernet Streaming :
| Mode | Protokol | IP Adres | IP Port | Mesaj Tipi | |
|---|---|---|---|---|---|
| Port I1 | Server | TCP | 2138 | RTCM3.x | |
| Port I2 | Server | TCP | 2130 | RTCM3.x | |
| Port I3 | Server | TCP | 2137 | CMR+ | |
| Port I4 | Server | TCP | 2136 | ATOM | |
| Port I5 | Server | TCP | 2101 | RTCM3.x | |
| Port I6 | Server | TCP | 2139 | RTCM2.3 |
linuxde açık port ve socket
linuxte açık portları ve socketleri öğrenmek istiyorsak, en temel uygulamamız netstat dan başka bir şeye gerek yok.
fcicek@fcicek-home:~$ sudo netstat -plnt Aktif internet bağlantıları (sadece sunucular) Proto Recv-Q Send-Q Local Address Foreign Address State PID/Program name tcp 0 0 0.0.0.0:22 0.0.0.0:* DİNLE 1298/sshd tcp 0 0 127.0.0.1:631 0.0.0.0:* DİNLE 3905/cupsd tcp 0 0 127.0.0.1:5432 0.0.0.0:* DİNLE 1525/postgres tcp 0 0 127.0.0.1:5433 0.0.0.0:* DİNLE 1508/postgres tcp 0 0 127.0.0.1:3306 0.0.0.0:* DİNLE 1436/mysqld tcp 0 0 0.0.0.0:5355 0.0.0.0:* DİNLE 1293/systemd-resolv tcp6 0 0 :::22 :::* DİNLE 1298/sshd tcp6 0 0 ::1:631 :::* DİNLE 3905/cupsd tcp6 0 0 :::5355 :::* DİNLE 1293/systemd-resolv tcp6 0 0 :::80 :::* DİNLE 1524/apache2
fcicek@fcicek-home:~$ netstat -lx Active UNIX domain sockets (sadece sunucular) Proto RefCnt Flags Type State I-Node Yol unix 2 [ ACC ] AKIŞ DİNLENİYOR 34197 /tmp/.ICE-unix/2505 unix 2 [ ACC ] AKIŞ DİNLENİYOR 28166 /run/user/125/bus unix 2 [ ACC ] AKIŞ DİNLENİYOR 34061 /run/user/1000/systemd/private unix 2 [ ACC ] AKIŞ DİNLENİYOR 34066 /run/user/1000/bus unix 2 [ ACC ] AKIŞ DİNLENİYOR 34196 @/tmp/.ICE-unix/2505 unix 2 [ ACC ] AKIŞ DİNLENİYOR 87786 /tmp/.org.chromium.Chromium.9o8hA2/SingletonSocket unix 2 [ ACC ] AKIŞ DİNLENİYOR 27553 @/tmp/.ICE-unix/1750
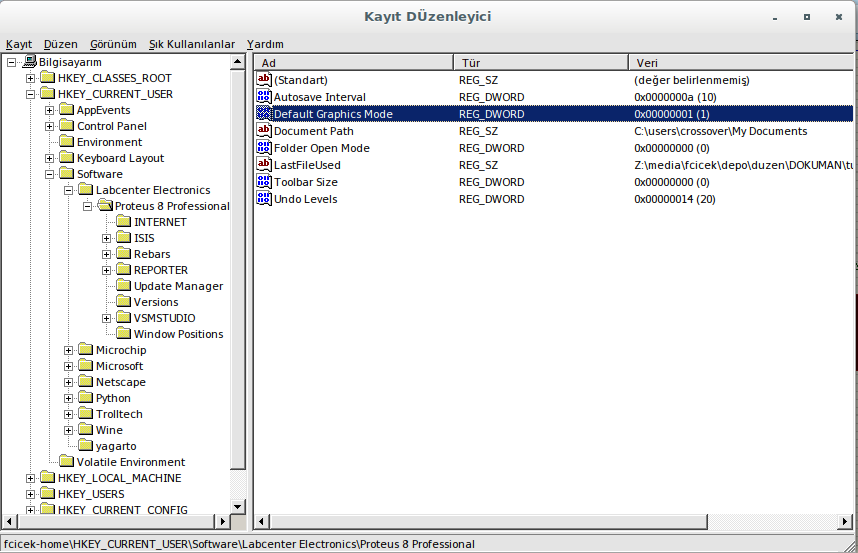
crossover veya wine da proteusda VGDVC.DLL hatası
linuxde zorunlu olarak bir proteus dosyası açmanız gerektiği durumda wine veya crossover üzerinde poteus kurarak dosyayı açmak istetediğinizde
“Internal Exception: Access violation in module ‘VGDVC.DLL’ [00010C56]”
hatası ie karşılaşmanız çok olasıdır.. bunun için regedit i açarak
HKEY_CURRENT_USER\Software\Labcenter Electronics\Proteus 8 Professional\Default Graphics Mode=1
değeri 1 olarak değiştirmeniz gerekmektedir.
Data Center Overlay Technologies
5846 Sayılı Fikir ve Sanat Eserleri Kanun Taslağı
5846 Sayılı Fikir ve Sanat Eserleri Kanun Taslağı’nda internetle ilgili olarak aşağıdaki metinlere yer verilmiş.
IV- İnternet ortamında hak ihlallerinin önlenmesi
MADDE 77/B ““Bu Kanunda tanınmış hakları internet ortamında ihlal edilen hak sahipleri, hak sahipliğini ve ihlali gösterir bilgi veya belgelerle birlikte içerik sağlayıcısına veya yer sağlayıcısına internet sayfalarındaki elektronik posta veya diğer iletişim araçlarına göndereceği uyarıyla, ihlale konu içeriğin yayından çıkarılmasını isteyebileceği gibi doğrudan Cumhuriyet savcısına başvurarak içeriğe erişimin engellenmesini de isteyebilir.
İçerik veya yer sağlayıcı, uyarıdan itibaren yirmi dört saat içerisinde talebi yerine getirir.
Kanunda tanınmış hakları internet ortamında ihlal edilen hak sahiplerinin talepleri doğrultusunda Cumhuriyet savcısı, ihlale konu içerik yayından kaldırılıncaya kadar içeriğe erişimin engellenmesine karar verebilir. İnternet sayfası belirtilerek içeriğe erişimin engellenmesi yöntemiyle ihlalin kaldırılamayacağına kanaat getirilmesi hâlinde, gerekçesi de belirtilmek kaydıyla, internet sitesindeki tüm yayına erişimin engellenmesine de karar verilebilir.
Erişimin engellenmesi kararına konu içeriğin kısmen veya tamamen başka internet adreslerinde de yayınlanması hâlinde, ilgili hak sahipleri tarafından müracaat edilmesi üzerine mevcut karar bu adresler için de infaz olunur.
Erişimi engelleme kararları, 4/5/2007 tarihli ve 5651 sayılı İnternet Ortamında Yapılan Yayınların Düzenlenmesi ve Bu Yayınlar Yoluyla İşlenen Suçlarla Mücadele Edilmesi Hakkında Kanun hükümlerine göre uygulanır.
İçeriğin yayından çıkarılması veya erişimin engellenmesi kararının ge re ği ni ye ri ne ge tir me yen yer ve ya eri şim sağ la yı cı la rı nın so rum lu la rı, fi il da ha ağır ce za yı ge rek ti ren baş ka bir suç oluş tur ma dı ğı tak dir de, beş yüz günden üç bin güne kadar adli para cezası ile ce za lan dı rı lır.
Meslek birlikleri, noktadan noktaya ağlar üzerinden veya benzeri yollarla internet ortamında umuma iletim niteliği taşıyan izinsiz paylaşımları takip amacıyla teknolojik yöntemlerle eserleri veya bağlantılı hak konularını işaretleyebilir ve kişisel verilerin gizliliğini temin edecek gerekli tedbirleri almak suretiyle, izinsiz paylaşımda bulunan kişinin yalnızca internet protokol adreslerinin tespiti amacıyla işaretlenmiş içerikleri takip edebilir.
Meslek birliklerinin Cumhuriyet savcısına başvurusu üzerine, noktadan noktaya ağlar ve benzeri teknoloji, yöntem ve yazılımlar vasıtasıyla izinsiz olarak eser veya bağlantılı hak konularını umuma iletim niteliği taşıyacak şekilde paylaşıma sunan internet abonesinin kimlik bilgileri tespit olunur. Kimlik bilgileri tespit edilen kişilere, paylaşımlarının ihlal teşkil ettiği ve sonuçları hakkında Bakanlık veya Bakanlıkça yetkilendirilen kuruluşlar tarafından yapılan iki uyarıya rağmen ihlali sürdürmeleri halinde Cumhuriyet savcısı, internet hizmetinin altı ayı aşmamak üzere belirli bir süre yavaşlatılarak sunulmasına karar verir.
Cum hu ri yet sav cı sı, bu madde uyarınca verdiği ka ra rları yir mi dört sa at için de sulh ceza hâki minin ona yı na su nar. Hâkim, ka ra rı nı en geç yir mi dört sa at için de ve rir. Bu sü re için de ka ra rın onay lan ma ma sı halin de ted bir, Cum hu ri yet sav cı sı ta ra fın dan der hal kal dı rı lır.
İçeriğin yayından çıkarılması, erişimin engellenmesi ya da internet hizmetinin yavaşlatılmasına ilişkin sulh ceza hakiminin kabul veya red kararlarına karşı, Ceza Muhakemesi Kanunu hükümleri uyarınca Fikri ve Sınai Haklar Ceza Mahkemesine itiraz edilebilir.
Bu madde kapsamındaki hak ihlallerinin önlenmesi amacıyla Bakanlık bünyesinde merkezler kurulabilir. Bu merkezlerin etkin bir şekilde işlemesini sağlamak amacıyla Bakanlık, Adalet Bakanlığından yeteri sayıda savcı görevlendirilmesini talep edebilir. Etkin, hızlı ve ihtisaslaşmış bir mücadele amacıyla Bilgi Teknolojileri ve İletişim Kurumu, Erişim Sağlayıcıları Birliği ve ilgili diğer kurumlarla gereken işbirliği sağlanır.
Bu maddede hüküm bulunmayan hallerde, 5651 sayılı Kanun hükümleri, niteliğine uygun düştüğü ölçüde uygulanır. Bu maddede belirtilen merkezlerin kuruluşu, yapısı ve işleyişi ile bu maddenin uygulanmasına ilişkin diğer hususlar Adalet Bakanlığının görüşü ile Bakanlık tarafından çıkarılacak bir yönetmelikle düzenlenir.
“/usr/bin/env: `node’: Böyle bir dosya ya da dizin yok” hatası
fcicek@fcicek-home:~$ cordova create MyApp /usr/bin/env: `node': Böyle bir dosya ya da dizin yok
hatası ile karşılaşıyorsanız nodejs ile ilgili eksik bir şeyler kurulmuş olabilir..
root@fcicek-home:~# sudo apt-get install nodejs-legacy
ı tekrar kurduktan sonra yeniden denmekte fayda var.
fcicek@fcicek-home:~$ cordova create MyApp ? May Cordova anonymously report usage statistics to improve the tool over time? Yes Thanks for opting into telemetry to help us improve cordova. Creating a new cordova project